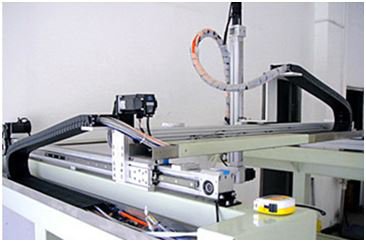
坐标机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。坐标机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。
特点1、自由度运动,每个运动自由度之间的空间夹角为直角;2、自动控制的,可重复编程,所有的运动均按程序运行;3、一般由控制系统、驱动系统、机械系统、操作工具等组成。4、灵活,多功能,因操作工具的不同功能也不同。5、高可靠性、高速度、高精度。6、可用于恶劣的环境,可长期工作,便于操作维修。